XERXES SCIENTIFIC
Xerxes Modular Drive Concept
About
Xerxes Scientific telescope mounts and gimbals are built on three families of core drive modules. Each drive module comprises a high performance, high pole count, high torque brushless DC motor, a Renishaw absolute optical encoder, and a shaft/bearing/housing assembly. Modules within a family have a standardized bolt pattern and mounting holes, but all modules use a common electrical and software interfaces. Different modules utilize different motor cores, and are upgradable within the same core diameter. All drives are operated using high performance industrial servo controls which operate via the CANopen industry standard protocol. Bracket kits are provided in order to create single or dual sided mounts in equatorial, alt-az, or alt-alt configuration, as well as options for other arrangements.
Electrical or pneumatically actuated brakes, motion stops, and other features can be added at customer request
How to Order
To create a complete telescope mount, you select a pair of drive modules which are suitable for your payload, and choose a mount arrangement, such as dual sided, single sided, offset equatorial, or alt-azimuth. We can provide guidance on proper module sizing based on your payload, location, and application. We will then create a bracket kit design and a servo drive package for your application. We can also provide no-flip "z" style or inclined type steel piers (the design intent for Xerxes mounts is no-flip), or we can provide a design that you can have fabricated locally to save on shipping costs. We can also provide customers with a kinematic 3D model of their mount to support sizing studies for observatories. We will then quote your package and proceed to production. We have full CNC machnining capability in-house, and support all US domenstic production requirements for federal contracting. Lead times depend on part availability but range from ten to sixteen weeks typically.
D11 & D21 Neo
lightweight, lower cost
200mm OD housing
36 to 47 peak torque
11 or 21 N-m continuous torque
15 to 17kg weight
120mm bearing diameter
single and dual sided options
Price: $6,800 to $7,500 per module
D33 & D60HR
Perfect for arrays of 4 to 6 scopes
240mm OD housing
150 to 260 N-m peak torque
33 or 60 N-m continuous torque
35 to 42kg weight
150mm bearing diameter
D33 available in single and dual sided options
Price: $12,500 to $13,800 per module
D79 & D140
Azimuth or RA drive for large payloads
340mm square body, 310 to 600 N-m peak torque
79 to 140 N-m continuous torque
115 to 130kg weight (est)
200mm north (upper) bearing
Price available on request
Servo Drives & bracket kits
48VDC to 220VAC power
COTS based industrial servo drives
Linux low-level control via ethernet interface
Bracket kit and spacers connect two axes together
Astronomical control SW for alt-az and equatorial
About

Dual Sided Telescope Mount Options
The arrival of high performance, low cost, wide field imaging systems and modestly priced cameras has ushered in the era of array telescope mounts. The Dual sided equatorial mount is ideal for carrying four to six telescopes, placing two or three on each side of the declination axis. Each drive module with the suffix "DUAL" has an extended shaft capped with a mounting flange on each end. The D11, D21 (200mm OD) and D33 (240mm OD) modules have standard dual sided configurations, but any module can be custom-designed as dual sided. In addition, custom tilt / hinge mechanisms can be provided, which allows the telescopes on that side to be offset in RA by up to 2.5 degrees, via pneumatic or electric actuators which are remotely controlled. This allows all telescopes to either point to a single target or to be spread out in survey mode. Accessories also include an optional pneumatically actuated brake for the declination axis, axis stops, "P" type dovetail saddles, and other customer requested features, such as mounting plates with individual tilt adjustment and actuation. See the accessories page for more information.
Mount / Gimbal Geometry Options
Single and dual sided bracket kits have been used for both equatorial and alt-azimuth mode operation. The bracket and counterweight kit can be custom fabricated to your specifications or modified in the future if your use case changes. Example configurations are semi-offset, GEM-like , and fork mounts (with one driven side). You also can fabricate your own support structure or retrofit the drive to an existing legacy mount.

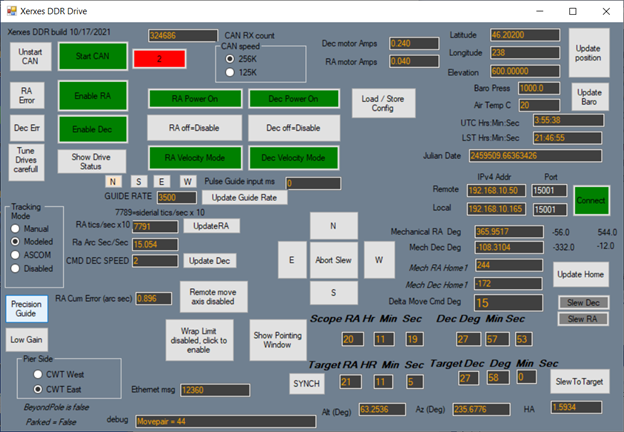
Control Software
Xerxes mount control software provides all the standard functionality required for observatory operation plus an additional linux-based control mode for full direct control and non-astronomical (gimbal) applications. Features include model based pointing corrections, variable rate tracking via modeling (for equatorial mode), ASCOM interface support, user tuneable control loop gains during tracking, motor current monitoring, independent enable / disable of each axis for easy hand movement, pulse guider support, and high speed user interface functionality via UDP datagrams operating at a 20Hz loop rate. Satellite tracking is provided for equatorial mounts via an auxiliary program. Alt-azimuth mounts are supported for astronomical applications with additional functionality coming soon. Gimbal applications are provided with both a high speed UDP datagram interface on 2 axes and a parallel TCP message based interface for two and three axis control. Example Python scripts are available to customers for both gimbal applications and astronomical control using ASCOM Alpaca via ASCOM Remote. The interace protocol is available to all customers.
|
|
|